Click on the screenshot to start the Forward Kinematics simulation
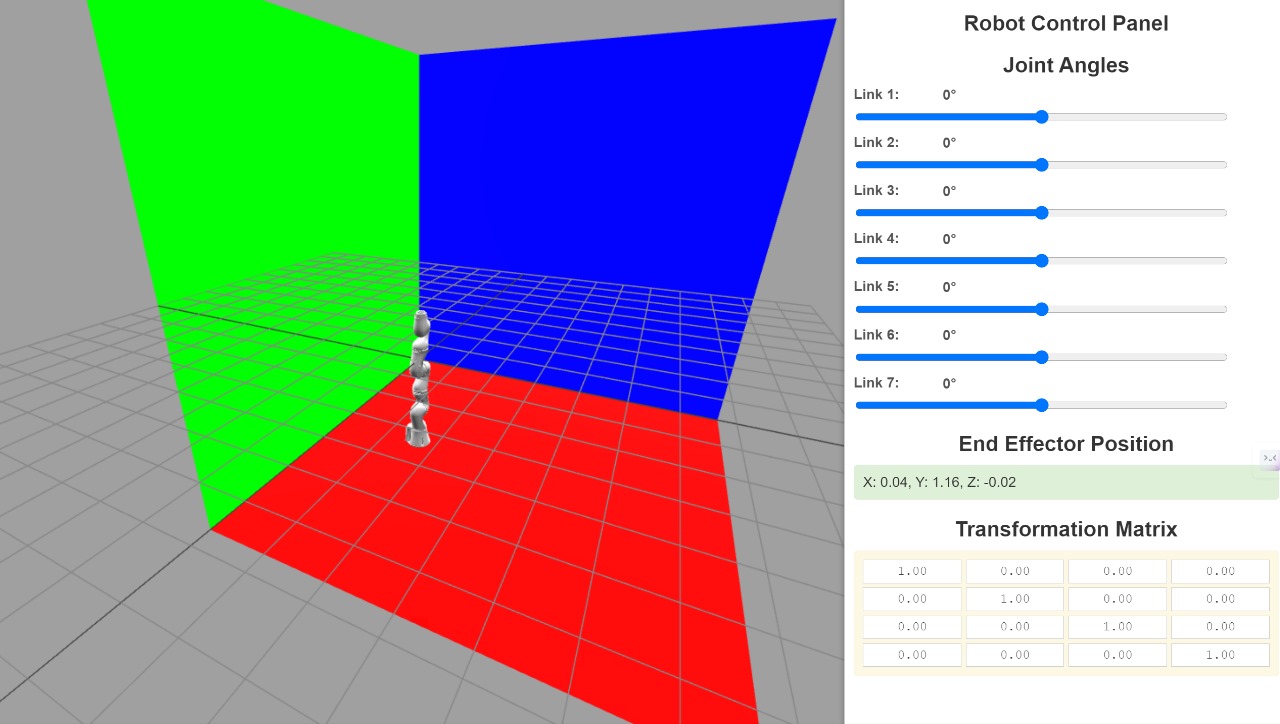
Simulator Screen shot
Click to open the Forward Kinematics Simulator Tab
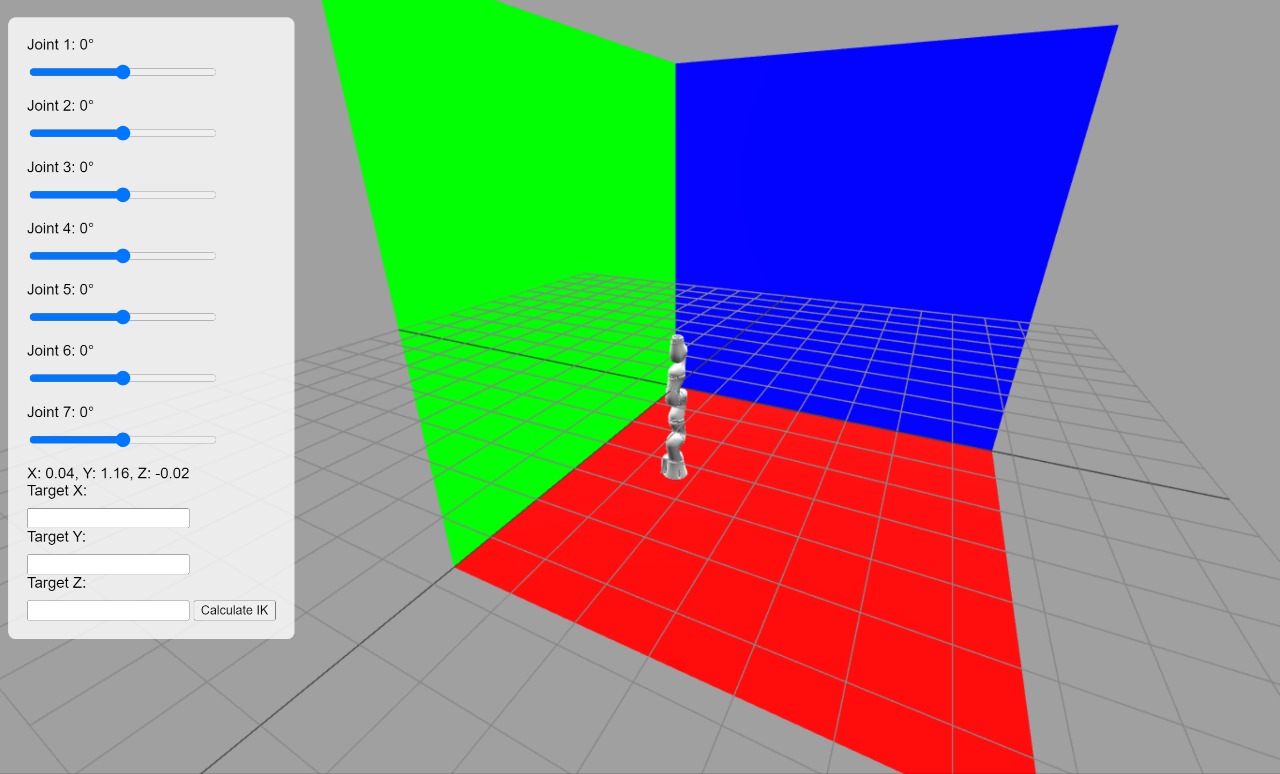
Click on the screenshot to start the Inverse Kinematics simulation
This program simulates a 7 link 3D KUKA IIWA LBR Robot using the javascript program. The model and its movement of different links are encoded in javascript language. With this program, the forward kinematics of KUKA IIWA LBR is explained, and simultaneously movements of different joints at a time can be seen. Axis coordinates and orientation are setup according to the theory explained earlier. This program does not allow for the specification of angular speed or acceleration of the arms. Click on the screenshot given below to start the simulation.
| ANGLE | RANGE | DOF |
|---|---|---|
| θ1 : 170 | -170 to 170 | Base Joint |
| θ2 : 120 | -120 to 120 | Shoulder Joint |
| θ3 : 170 | -170 to 170 | Elbow Joint |
| θ4 : 120 | -120 to 120 | Wrist 1 Joint |
| θ5 : 170 | -170 to 170 | Wrist 2 Joint |
| θ6 : 120 | -120 to 120 | Wrist 3 Joint |
| θ7 : 170 | -170 to 170 | Tool Joint |